
このページは、ホーム![]() What's New
What's New![]() 2015年
2015年![]() 大水深構造物の点検用水中調査ロボットを開発のページです。
大水深構造物の点検用水中調査ロボットを開発のページです。
What's New
大水深構造物の点検用水中調査ロボットを開発
2015年6月22日
五洋建設株式会社(社長 清水琢三)は、大水深構造物の点検・診断に効率的・効果的に適用できる水中調査ロボットを独自に開発いたしました。さらに、2014年度に国土交通省が公募した「次世代社会インフラ用ロボット技術・ロボットシステム 水中維持管理技術」に参加し、開発した水中調査ロボットを宮ヶ瀬ダム(神奈川県)での現場実証試験に適用し、「事業化については可能なレベルであり、現場適応性および経済性については現行より優れる技術である。」と評価をいただきました。
社会インフラにおいて、多くの施設で老朽化が進んできており、効率的・効果的な維持管理が求められています。特にダム堤体などの水中構造物では、安全面と効率面から大水深域において、潜水士による調査が難しいという課題があります。このような背景を踏まえ、当社では、大水深の水中構造物の点検用に、遠隔操作無人探査機(Remotely operated vehicle:ROV)を利用した水中調査ロボットを開発いたしました。
 写真-1 ROVを利用した水中調査ロボット(サイズ:長さ80cm、幅50cm、高さ48cm)
写真-1 ROVを利用した水中調査ロボット(サイズ:長さ80cm、幅50cm、高さ48cm)
2014年11月に宮ヶ瀬ダムで実施された国土交通省の現場実証試験では、国土交通省が設置した試験体や堤体の鮮明な画像を取得するとともに、高位および低位洪水吐きや水深127mの水底付近まで潜航し、画像を取得しました。写真-2および写真-3は、現場実証試験で得られた画像の例です。 2015年3月には、国土交通省(次世代社会インフラ用ロボット現場検証委員会 水中維持管理部会)から「抽出された課題への対応により、早期の事業化に期待する。」という高い評価をいただきました。それを踏まえて、現場実証試験での課題として挙げられた作業確認用カメラ内への漏水については、実証試験後に早期に対策を講じ、耐圧試験により水深150mまでの耐水圧性能を有するように改善できたことを確認しています。
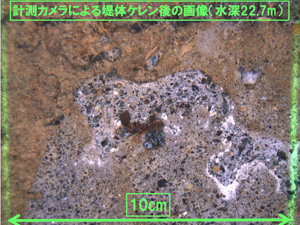 写真-2 清掃(ケレン)後の堤体面の撮影画像(緑縦線は10cm間隔のグリーンレーザーの線)
写真-2 清掃(ケレン)後の堤体面の撮影画像(緑縦線は10cm間隔のグリーンレーザーの線)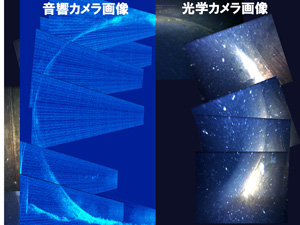 写真-3 高位常用洪水吐(水深48m)の緩行部(音響カメラ画像と光学カメラ画像の比較)
写真-3 高位常用洪水吐(水深48m)の緩行部(音響カメラ画像と光学カメラ画像の比較)