
���̃y�[�W�́A�z�[��![]() �\�����[�V�����E�Z�p
�\�����[�V�����E�Z�p![]() �v���W�F�N�g
�v���W�F�N�g![]() �v���W�F�N�g�X�g�[���[
�v���W�F�N�g�X�g�[���[![]() �F�{57�������g���l���̃y�[�W�ł��B
�F�{57�������g���l���̃y�[�W�ł��B
�F�{57�������g���l�� �\ �f�W�^���Z�p����g���A�����̌����n�� �\

 ����ʒu�}�i�摜�g��j
����ʒu�}�i�摜�g��j
�F�{�s���N�_�ɉF�y�s�A�F��s�A��V���s���o�R���A�V���s�Ɏ��鉄����70�q�̒n�捂�K�i���H�u�F�{�V���������H�v�̐������i�ށB���H�Ԃ̏[���ɂ��F�{�����e�n�悩��F�{�s�܂ł�90���Ō��ԁu90���\�z�v���f����F�{���ɂƂ��Č������Ȃ��d�v�Ȗ�����S�����H�̈���B���y��ʏȋ�B�n�������ǂ��F�{���ƘA�g���A�n��Ԍ𗬂̊������ƍЊQ�ɋ������H�l�b�g���[�N�̌`���ɗ͂𒍂��ł���B
�����g���l���V�ݍH���͌F�{�V���������H�̈ꕔ�ƂȂ鍑��57���o�C�p�X���H�u�F�y���H�v6.7�q�̖k�[���Ɍv�悳�ꂽ�B���ˎR�̔������т�����679m��2�Ԑ��g���l����NATM�H�@�Ō��݂�����̂ł���B�@��f�ʂ�100m2�����f�ʃg���l���ŁA�ő�y���͖�70m�B�v���̒n���͐V�����l�I��x�ΎR��ނ̎��j�ӏ���R��ō\������A�n�R�����̎�̂�D�`CL���ł���B
�@������͕������R�⎿���j�ӗn��̈ꎲ���k���x��49N�^mm2���x�ȉ��ł��邱�Ƃ����^�@�B��p���A�㔼��i�V���[�g�x���`�J�b�g���H�@��2022�N2���ɏI�_���i�V���s���ʁj����@����n�߂��B�ڗ������N�����Ȃ��A���ʂ���r�I���肵�Ă������Ƃ���A�B�����̐�H�{�H��Ԃ������A�����t���R���N���[�g�p���邱�ƂŊT�ˏ����Ɍ@�킪�i���B2023�N1���Ɋђʂ��A���N7���ɍH�������������B
���g���l���f�ʂ��㉺�ɕ������㔼�����Ɍ@��i�߂�H�@�B�㉺���i����`���x���`�̂悤�Ȍ`�ƂȂ邱�Ƃ��炱�̖�������B�x���`��50m�ȉ��Ō@�킷��ꍇ�A�V���[�g�x���`�J�b�g�H�@�Ƃ����B
 �u90���\�z�v�̎����Ɍ����������i�ތF�{�V���������H�i�摜�g��j
�u90���\�z�v�̎����Ɍ����������i�ތF�{�V���������H�i�摜�g��j
���o�T�F��B�n�������ǔ���͐썑���������z�[���y�[�W
�f�W�^���c�C�����Łu�g���l���������{�H�v������
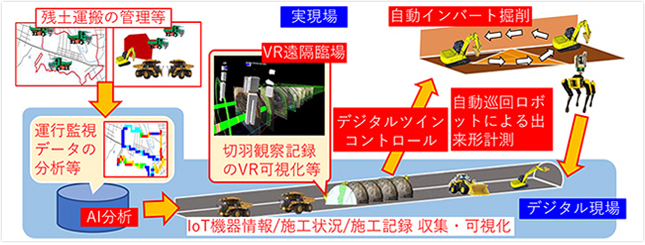
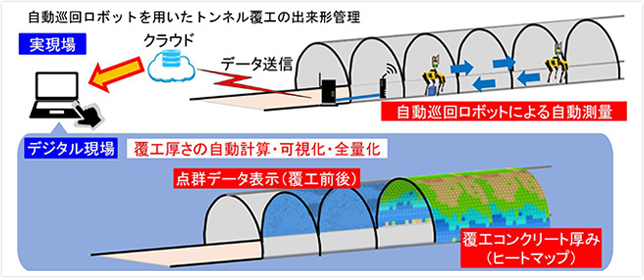
���y��ʏȂ����{����2022�N�x�́u������̐��Y�������I�Ɍ��シ�邽�߂̊v�V�I�Z�p�̓����E���p�Ɋւ���v���W�F�N�g�v�iPRISM�j�ɓ��Ђ��\�Ƃ���R���\�[�V�A���̒�Ă��̑����ꎎ�s����ɑI�ꂽ�B�Z�p�h�uAI�AIoT���n�߂Ƃ����V�Z�p�������p���ēy�܂��͌��z�H���ɂ�����{�H�̘J�����Y���̌����}��Z�p�v�ƋZ�p�U�u�f�[�^�����p���ēy�؍H���ɂ�����i���Ǘ��̍��x������}��Z�p�v�����s�����B �g���l���̃f�W�^���c�C�����\�z���A���܂��܂Ȍv���f�[�^����������ƂƂ��ɁA���ʂ�{�H�̎������ɒ��킵���_���傫�ȓ������B���z��ԏ�ɂ�����̃g���l���𐳊m�ɍČ����A���z��ԑ�����ICT���@�������E�����Ő��䂷��ȂǁAGPS/GNSS���g���Ȃ��g���l���B���Ńf�W�^���Z�p����g���Ȃ��琶�Y������S���A�i���̌����Nj������B
�������̏����f�W�^����ɍČ����邱��
�Z�p�h�uAI�AIoT���n�߂Ƃ����V�Z�p�������p���ēy�ؖ��͌��ݍH���ɂ�����{�H�̘J�����Y���̌����}��Z�p�v
���{���e
 �f�W�^���c�C�������p�����{�H�Ǘ��Ɖ��u�Տ�
�f�W�^���c�C�������p�����{�H�Ǘ��Ɖ��u�Տ�
| �ܗm���݊������ | ������w�@�l����w | ������ЃV���[�W | NSW������� | ������Ѓl�N�X�g�X�P�[�v |
| �S�̊Ǘ��A�N���E�h�^�p�ABIM/CIM�Ή��A�@�풲�B�^�^�p | BIM/CIM�\�������E�w�� | ���l���{�H�p�o�b�N�z�E�E���� | IoT�f�[�^���� | VR/MR�V�X�e���^�p�A�f�W�^���c�C���T�[�o�[�^�p |
����̎{�H�Ǘ������N���E�h�ɏW��
���Ђł͂���܂Ŏ��ЊJ���̎{�H�����W���L�V�X�e���ui-PentaCOL�v�i�A�C�E�y���^�R���j���g���A����ł�BIM/CIM�̊��p���㉟�����Ă����B����̃f�W�^���c�C���͂��̔��W�n�Ƃ����ʒu�t�����B
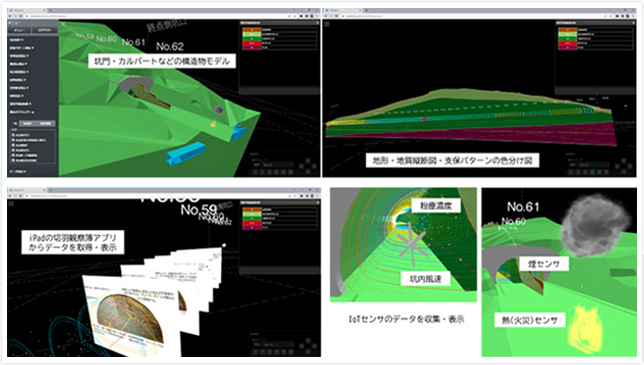
�ԗ���{�H�@�B�̔z�u�A�B���ϑ��f�[�^�A�{�H�Ǘ��f�[�^�Ƃ���������̎{�H�Ǘ������N���E�h��̃f�W�^����̌���ɏW�A���X�̊Ǘ��Ɩ��i�{�H�E�J���E���S���j�̒ጸ�⏑�ނ̍팸�Ȃǂ�}�����B�f�W�^���c�C����WEB��VR��Ԃ��A�g���Ă��邽�߁A�^�u���b�g�[����p�\�R����ʏ�Ńf�W�^����̌�����펞�{���ł��AVR�f�o�C�X�Ńf�W�^����̌���ɖv�����邱�Ƃ��\���B������Ō���̏��m�F�ł��A�؉H�ߖT�ȂNJ댯�Ȏ{�H�G���A�ł̑ō������l�������Ȃ��s���邽�߁A���S��������I�ɍ��߂邱�Ƃ��\�ƂȂ����B
 BIM/CIM���W�҂ɋ��L�E���p����V�X�e���Ō���̎{�H�Ǘ������ꌳ��
BIM/CIM���W�҂ɋ��L�E���p����V�X�e���Ō���̎{�H�Ǘ������ꌳ��
�啝�ȏȐl���A�ȗ͉�������
�{�H�̔c�����\�ȃf�W�^���c�C���̏�����荞��ŁA�K�ȃ^�C�~���O�ŋN������ړ��A�{�H�A�ޔ��Ɏ����A�̓���������������B������ł̓o�b�N�z�E�ɂ��C���o�[�g�@��i�u���[�J��Ɓj�������{�H�̑ΏۂƂ��A�I�y���[�^�[�ƌv����ƈ���s�v�Ƃ����B�g���l���B���͔�GNSS���ł��邽�߁A�����^�]�@�B�͎擾�����_�Q���m���d�ˍ��킹��SLAM�Z�p�����ʒu������s�����B�܂��A�C���o�[�g�@��̏o���`�m�F�ɂ͑��ʗp�O�����X�L���i�[�𓋍ڂ����������{�b�g���g�p���A�����x�Ȍ@��U���ɖ𗧂Ă��B
 �f�W�^���c�C���Ō����C���o�[�g�@��̐����
�f�W�^���c�C���Ō����C���o�[�g�@��̐����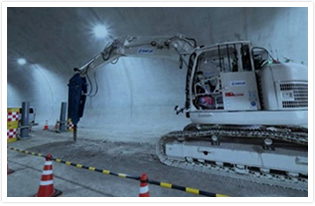 ICT�𓋍ڂ�����^�u���[�J�[�ɂ��C���o�[�g�@��
ICT�𓋍ڂ�����^�u���[�J�[�ɂ��C���o�[�g�@��
�Z�p�U�u�f�[�^�����p���ēy�؍H���ɂ�����i���Ǘ��̍��x������}��Z�p�v
���ؓ��e
 �������{�b�g��p�����g���l�����H�̏o���`�Ǘ�
�������{�b�g��p�����g���l�����H�̏o���`�Ǘ�
| �ܗm���݊������ | ������w�@�l����w | ������Ѓl�N�X�g�X�P�[�v |
| �S�̊Ǘ��ABIM/CIM���f���쐬�A���{�b�g���B�^�^�p | BIM/CIM�\�������E�w�� | �f�W�^���c�C���T�[�o�[�^�p |
���H�R���N���[�g������ʓI�ɔc��
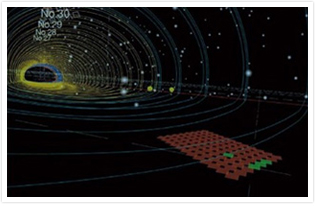
�C���o�[�g�̌@��Ɏg�p����3�������[�U�[�X�L���i�[�𓋍ڂ����������{�b�g���R�x�g���l���̎{�H�G���A������B�R���N���[�g���t���ʂ̌`���E�^��̕��H�R���N���[�g�ʂ̌`���ʓI�Ɍv�������B�擾�����_�Q�f�[�^���N���E�h�ɑ��M���A�f�W�^���c�C���ɂ���Č`�������������Z�o�E��������B���H�ŐݑO��̓_�Q�f�[�^���m�̍��قŎ����I�ɕ��H�R���N���[�g�̌������q�[�g�}�b�v�ŕ\�����邱�ƂŌ�����ʓI�ɔc���ł���B����ɁA�_�Q�f�[�^��VR��ԓ��Ŏ蓮�v���ł���d�g�݂��\�z�BVR�@�\���g���ăf�W�^������ɖv�������ۂɉ��u�n����ł��ȒP�Ɍv�����Ȃ���o���`���m�F�ł���悤�ɂ����B�]���̌����E��p���������m�F���s�v�ɂȂ�ȂǁA����Ǘ���Ƃ̑啝�ȍ팸�ɂȂ��蓾�邱�Ƃ��m�F�����BDX�Ɍ������Ǘ�������ڕW�Ƃ������g�݂ł���A����̌��،��ʂ܂��A���{�b�g���l�̍�Ƃ��ւ��邱�Ƃ��\�ƂȂ�悤�ȊǗ���@���Ă���B
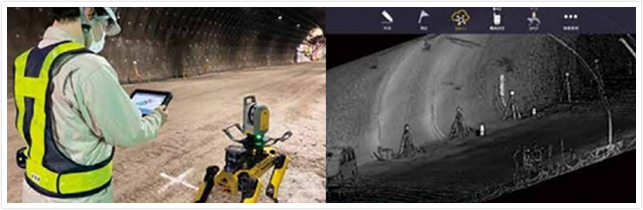 �l�����s���{�b�g��3D���[�U�[�X�L���i�[�𓋍ڂ������ōB���̏o���`�Ǘ������{
�l�����s���{�b�g��3D���[�U�[�X�L���i�[�𓋍ڂ������ōB���̏o���`�Ǘ������{
�����C���^�r���[
 �H������ �n� �L�O
�H������ �n� �L�O
PRISM�̎��s����Ŏ����I���A�f�W�^���c�C���������I�Ƀg���l���H���̎������Ɍ������Ȃ����Ƃ��m�M���܂����B�����Ă������Ȃ��Ƃ́uBIM/CIM�̍ő劈�p�v�ł��BAI��{�b�g���v���A��͂������鉻����BIM/CIM��E����I�y���[�^�[���f�W�^���c�C����ŊǗ�������ł���ȂǁA����܂ł�BIM/CIM�ȏ�Ɋg�����������܂����B
�f�W�^���c�C�������p���{�H�Ǘ�����IoT�Z���T�[�Ȃǂ̃f�[�^���N���E�h�ɏW�邱�ƂŁA�Ǘ��Ɩ��̕��S�y���ɑ傫�Ȍ��ʂ����҂ł��܂��B�܂��A�E���͏�ɍŐV�̃��f�������p���i����H���̊Ǘ��ɒ��͂ł���_���傫�ȃ����b�g�ł��B����̎��p���ɔ����A�]�@��̏k���Ȃǂɂ��{�H�����̌���A�����x�ȖʓI�Ǘ��ɔ����i������A�d�@�ߖT�̌����Ƃ����邱�Ƃɂ����S���̌��㓙���傢�Ɋ��҂ł��܂��B
����܂Ŋ��I�ɓ���ƌ����Ă����g���l���{�H�̎��������f�W�^���c�C���̓����Ō����Ɉ���߂Â����Ƃ������G�Ă��܂��BICT����̔��W�E�i���͂߂��܂������̂�����A����͓K�p�͈͂�����Ɋg�債�Ă��������ƍl���Ă��܂��B
| �H������ | �F�{57�������g���l���V�ݍH�� | |
|---|---|---|
| �H���ꏊ | �n�F�F�{���F�y�s������ �I�F�F�{���F�y�s�ԒÒ� |
|
| �H�� | 2021�N2��23���`2023�N7��31�� | |
| ������ | ���y��ʏȁ@��B�n�������� | |
| �{�H�� | �ܗm���݁i���j | |
| �H���T�v | �g���l�� | |
| �@�g���l��(NATM) | L=679m | |
| �@���H�E�h���H | L=677.6m | |
| �@�C���o�[�g�H | L=518.8m | |
| �@�B��H | 2�ӏ� | |
| ���H���� | ||
| �@�@��H | 5,480m3 | |
| �@���y�H | 5,280m3 | |
| �@�J���o�[�g�H(2.0m×2.0m) | L=34.0m | |
| �@�J���o�[�g�H(5.0m×3.3m) | L=15.6m | |
![�M���h���}�����܂��B[�V�L���s������]���K�Ȋϐ�����L�����m�J�[�v�̃z�[���O���E���h�������B](../../../../common/images/local_bn006.jpg)
![���E�ɒ��ޒj�����B�@[�X�G�Y�^�͉��C] ���{�̊C�m�y�؋Z�p�̈АM���������ە���ɒ��ܗm���݂̕���B](../../../../common/images/local_bn004.jpg)
![���ƌ|�p�̑��ԁ@[�G�X�v���l�[�h�V�A�^�[] �V���K�|�[���̌|�p�̋��_�Ƃ���30�N�ɓn��\�z����������E���w�̌����ł�](../../../../common/images/local_bn005.jpg)