
このページは、ホーム![]() ソリューション・技術
ソリューション・技術![]() 技術一覧
技術一覧![]() 土木技術
土木技術![]() 水中ポジショニングシステムのページです。
水中ポジショニングシステムのページです。
水中ポジショニングシステム
概要
起重機船やグラブ船等の近傍で潜水作業を行う場合、海中の潜水士位置は、送気ホースの長さと潜水士からの気泡の位置などから間接的に推測しています。
しかし実際の位置を直接確認できないため、吊荷との接触・挟まれ等の発生を完全に排除できません。特に狭隘な場所、作業が輻輳する場所では細心の注意が必要となります。
「水中ポジショニングシステム」は、潜水士や吊荷に取り付けたトランスポンダと、潜水士船や作業台船に設置した送受波器、GPS、コンパスなどによって、水中における潜水士や吊荷の位置を把握できるシステムです。
※技術評価・特許
(財)沿岸技術研究センター 港湾関連民間技術の確認審査・評価事業評価技術(第10002号)
特長
視覚的な位置関係の把握が可能
工事エリア図に潜水士・吊荷の位置をプロットして、施工計画や管理範囲との位置関係をクレーンオペレータ席や作業船上で把握できます。
管理エリアの設定と注意喚起が可能
任意に設定した管理範囲内に監視する潜水士・吊荷が入ると警告を表示して注意喚起ができます。
適用範囲
潜水士が行う通常の水中作業全般に適用できます。
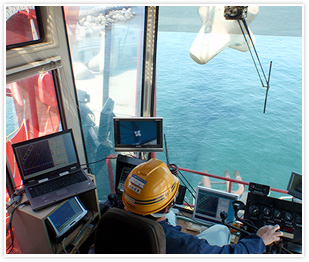
オペレーション席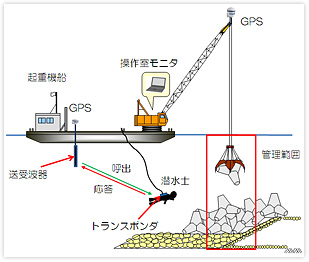
システム概要図
