このページは、ホーム![]() What's New
What's New![]() 2012年
2012年![]() 「水中ポジショニングシステム」を開発のページです。
「水中ポジショニングシステム」を開発のページです。
What's New
「水中ポジショニングシステム」を開発
〜潜水士と吊荷の測位・監視で潜水作業での安全性向上〜
2012年01月30日
五洋建設株式会社(社長: 村重芳雄)は、海上工事における潜水作業の安全性を向上する目的から、潜水士による作業や吊荷位置をより高度に測位・監視する「水中ポジショニングシステム」を開発し、財団法人沿岸技術研究センター港湾関連民間技術の確認審査評価証を取得しました。
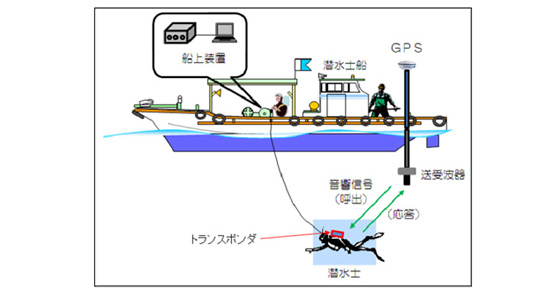
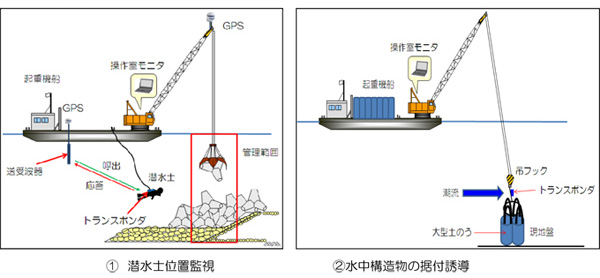
一般に、潜水士と作業船上の監視員は水中電話によって連絡を取り合い、海中の潜水士の位置は船上から繰り出した送気ホースの長さと潜水士が発する気泡の位置で判断しています。このため、グラブ浚渫船や起重機船近傍での潜水作業は吊荷との接触や挟まれ等の危険が伴います。また、水中構造物の据付誘導では、起重機船のクレーン先端部にGPSや光波用プリズムを設置し、吊荷の誘導・据付を行っていますが、潮流が速い現場や大水深における施工では、クレーン先端部と吊荷の位置が一致しない場合があります。
この度当社が開発した「水中ポジショニングシステム」は、潜水士や吊荷などの測位対象物にトランスポンダを設置して、潜水士船や作業台船の船上装置で対象物の位置特定・監視を行うもので、従来の水中測位方法に比べ、水中での作業の安全性・効率性を向上させることができます。
本システムの特徴は以下の4点です。
- 同時に6つの対象物を作業半径150m×水深30mの範囲で測位可能。
- 対象物の水中位置を作業船上のモニタで監視することにより潜水士を誘導することや、ブロック据付時の起重機船オペレータが潜水士や吊荷の位置を確認しながら作業を行うことが可能。
- 管理範囲内に対象物が入るとモニタに警告を表示し注意喚起をすることが可能。
- 対象物に取り付けるトランスポンダはワイヤレスのため作業性がよい。
本システムは、大水深または潮流の速い箇所、透明度の低い箇所での潜水作業で特に効果を発揮することができます。一般的な港湾工事に加え、これから本格化する、東日本大震災の復旧・復興工事においては、防波堤の復旧工事や海底に四散したがれきや障害物の撤去工事を安全且つ効率的に作業することが可能です。
今後は実現場での運用データの蓄積を行い、より水深が大きく狭隘な施工場所への導入など適用範囲の拡大やシステムの信頼性を高め、より一層安全な施工に努めてまいります。